摘 要:无人机低空航测技术可以迅速、高效、准确的获取影像信息,已经成功应用重大项目建设、城市规划管理、政府决策等领域。本文设计了无人机进行1 500数字航测外业航飞技术路线、内业空三加密、立体测图等技术流程,结合武汉市东西湖区新沟镇实际生产项目进行试验,分析了作业过程中的关键方法并进行精度检查,结果表明可生成平面精度约为10cm 的正射影像图,数字线划图也符合大比例成图精度要求。本文结合实际分析处理方法的关键步骤,同时为1 500数字成图提供一些借鉴和思考。
关键词:无人机;航空摄影测量;空三加密;立体测图
0 引言
无人机航空摄影测量以其机动灵活、成本低廉、效率较高、支持云层下作业等技术优势,已广泛应用于重大项目建设、城市规划管理、政府决策等众多领域。以无人机获取的影像信息,完成正射影像(DOM)图制作已较为成熟,由于DOM影像数据只包含二维坐标信息,无法反映地物的真实高程信息。所以,利用相关高分辨率正射影像数据恢复三维立体模型完成1 500数字线划图(DLG)的制作,针对外业规划核实测量、违法建筑监测等多项工作都具有借鉴意义。因此、本文针对无人机航摄数字测图过程中若干关键技术问题,进行了相关研究。
1 无人机航测系统简介
无人机航空摄影系统由飞行平台、飞行导航与控制系统、机载传感器设备、地面监控系统、数据传输系统、地面保障系统、发射与回收系统等组成;概括来说,主要由高分辨率数码相机、高精度POS(GPS/IMU)定位、定姿系统或者GPS定位辅助系统组成。
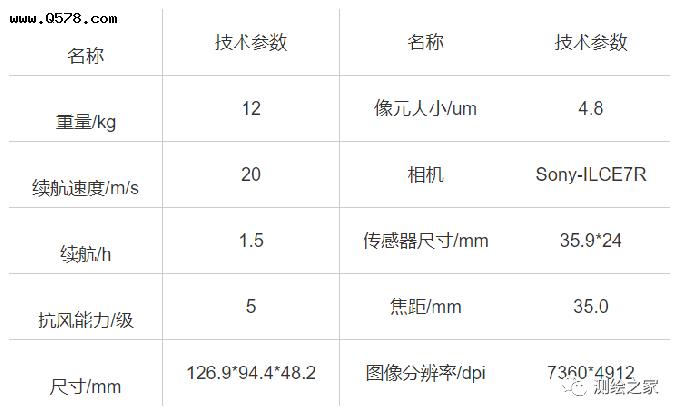
本文采用大鹏CW-10固定翼无人机航摄系统,搭载SONY-ILCE7R相机以及POS平台进行测区试验,具体相关参数如表1所示。固定翼无人机相较于多旋翼无人机,抗风能力相对较强,空中飞行姿态比较稳定,价格相对低廉,因此比较适合于高精度低速航空摄影测量。
表1 无人机相关技术参数
2 无人机航测技术方法
本文根据实地调查的测区情况,结合现有资料以及相关技术规范要求,设计如下的无人机航摄技术路线,如图1所示,其中外业调绘部分不作详细论述,这部分根据甲方要求,如需实地调绘,再按照相关要求进行实地外业测量工作。
图1 无人机航摄技术路线
3 实例分析
3.1 测区概况
本次试验测区位于武汉市东西湖区,地处武汉市中西部,测区范围约为4km2;由于地区处于武汉市边缘地区,我院现势1 500武汉市城区地形图数据并未涉及,影像数据也仅更新至2015年,为了快速准确的获取当前该地区房屋现状,用于下一步该地区的规划决策,传统的纯外业测绘效率相对较低,因此利用无人机低空航测技术完成此次外业航飞任务,获取该地区最新的影像数据。
本次无人机设计航线飞行方向为东西方向,相对航高为317m,航线重叠度为75%,旁向重叠度50%,像元大小为4.8um,影像地面分辨率为0.04m,有效架次1次,总共获取579张照片,无人机由于搭载的是非量测相机数码相机,其受地区和环境的影响较大;本地区周围有水系,航摄影像会受到一定的影响,相片边缘易产生相应的畸变;因此在空三加密平差时,会针对上述情况,结合实际,选取合理的加密点,保证空三加密和正射纠正的精度。
3.2 数据处理软件介绍
本文引入Agisoft公司开发的Photoscan软件完成正射影像图制作,使用Photomod软件进行影像空三加密平差,恢复立体像对;结合全数字化测图平台Mapmartix软件进行网络化立体测图,制作相应的DLG数据。
3.3 数据处理
Photoscan是一款无人机影像自动生成高质量三维模型的软件,软件使用视图三维重建技术处理照片,通过导入控制点生成具有真实地理参考以及详细彩色纹理的三维模型和正射影像,生成精度约为5cm 的专业级摄影测量数据。具体处理流程如图2所示。
图2 Photoscan 处理流程图
本文使用GPS RTK动态量测所需像片控制点,可以同时获取地物的平面和高程信息,由于无人机航空摄影要求影像重叠度大,基线较短,根据《1 500地形图航空摄影测量外业规范》,外业像片控制点布设要求沿航向、旁向分别布设,具体即为沿航向间隔500m布点,沿旁向间隔500m布点。
此次试验区共布设29个控制点,其中每个控制点均可以作为平高检查点,为后续数据处理提供地理参考。此外,外业获取的像控点坐标一般为WGS84坐标,本文为了方便利用已有成果资料,使用布尔莎七参数转换将坐标转换为1954北京坐标系,进行内业数据处理,并投影至武汉市本地中央子午线E114 。最终成果高程基准和坐标系统分别为1985国家高程基准与武汉2000坐标系。
空三加密是决定无人机航空摄影像成图精度的关键步骤;本文分别使用Photomod软件中Aerial Triangulation(AT)和solver模块进行无人机影像空三加密和平差,具体流程如图3所示,软件通过判读导入的控制点和量测的控制点之间偏差,基于Patb光束法严格平差,计算点位残差,保证立体测图所需像对的精度。
图3 Photomod软件空三加密处理流程
其后本文根据空三加密、平差恢复的影像立体像对,于数字化测图平台Mapmartix软件进行DLG数据采集工作。软件基于高速网络图幅方式的全无缝测图,作业步骤包括建立工程、引入空三成果、分割模型、分配任务、客户端进行生产、客户端成果上交等,具体流程如图4所示。
图4 Mapmatrix软件处理流程
此外软件不需要提前采集核线,可以采用实时核线进行测图;能根据外方位元素和影像重叠度自动组合立体像对,生成最佳的交会角,提高测图的高程精度;也支持自动、手动切换立体模型;通过这样的工作方式,免除了模型接边的工作,方便生产人员操作,提高了测图的效率。
3.4 试验结果分析
根据GB/T15968-2008《遥感影像平面制图规范》可知,DOM 地物点相对于实地同名点的点位中误差不得大于表2规定。特殊地区可放宽0.5倍,规定2倍中误差为其限差。
无人机正射影像的几何精度,可以采用影像与控制点和检查点的套合检查以及拼接线的检查。本文利用Photoscan软件可以快速利用多视图影像对重叠照片进行处理,生成的高分辨率正射影像,再利用Photoshop进行匀色修补输出单幅影像,由图可知影像接边处色彩过渡自然,地物接边合理,人工地物完整,无重影和发虚现象,实际平面精度可达0.10m,满足表2相关规定。
表2 DOM平面位置精度 (单位:m)
为后续优化空三、三维建模提供精确的地理参考,本文在Photoscan软件处理过程中导入的实测控制点数据,可以基于照片对齐后生成的稀疏点云,创建的Mesh手动更新照片上控制点标记的位置,再借助软件匹配提示,实时更新控制点在照片上量测的位置,如图5所示。
图5 更新每张照片控制点点位
表3 说明了每个控制点和估计位置间的偏差以及重投影误差,为后续优化空三、三维建模提供精确的地理参考。由表可知29个控制点的残差三维RMS值为0.067mm;重投影误差为0.016pix。
表3 控制点三维RMS
本文使用的原始的无人机单幅影像如图6所示,由图可知,影像颜色均匀,纹理清晰,亮度适中,图像质量良好,可以满足测区项目的规划实施,对应区域的正射影像如图7所示。
图6 无人机单幅影像
图7 对应区域的正射影像
根据无人机航摄影像数据的特点,Photomod软件可以自动化进行空三数据处理,本文根据《数字航空摄影测量空中三角测量规范》确定相关指标精度,设定平差阈值,保证加密精度。加密之后的测区控制点平面中误差约为6cm,高程中误差约为8cm;满足相关测图精度要求。
根据生成的DLG 数据,检验了房角控制点的平面精度和高程精度,如表4、表5所示。
表4 立体测图平面精度 单位:m
表5 立体测图高程精度 单位:m
由表4可知,立体测图的平面精度较好,控制点平面中误差为0.446m,高程中误差为0.299m,平面精度优于0.5m,高程精度优于0.3m,满足1 500地形图航空摄影测量数字化测图规范要求。
4结束语
利用无人机航摄的技术,通过有效的技术流程设计和内外业数据处理,最终成果可以满足1 500数字线划图数据和数字正射影像图的精度要求,完成我院日常的生产研发等工作。但本文在研究的过程中发现处理流程中仍存在一些技术难点。
首先、外业像控点布设工作量较大,为了满足大比例尺空三精度要求,需要研究结合测区的情况和飞行质量,在保证精度的同时抽稀像控点布设数量,提高外业作业效率,研究最佳外业控制点布设方案。
其次、空三加密过程较为复杂,建立空中三角测量网,其精度易受到多种因素的影响:其一来源于像控点网络布设导致的参考点物方坐标系与实测坐标值之间的偏差;其二来源于相邻立体像对连接点的坐标的点位中误差;其三来源于邻近立体像对中心投影的物方坐标的点位中误差。空三加密的精度很大程度上决定了最终成果的成图精度,所以有必要根据实际情况优化空三加密方案,保证作业精度,同时减少作业时间,提高作业效率。并且、正射影像图精度受到作为地理参考的控制点精度、处理流程中的数据定向、刺点、点云提取、建模精度等多方面影响;Photoscan软件虽然自动化程度较高,但作业流程中关键操作失误、参数设置不合理,仍会导致生成的影响精度不佳。
最后、利用Mapmatrix软件立体测图,作业员需要充分利用影像和基线匹配技术,及时调整作业方法,选取最佳测图模型,才能保证DLG数据的精度。